
A short video showing the Columbia Swarm in action.
Project Overview
The Columbia Swarm was designed and built as my senior project at Columbia. The idea was accepted into the 2012 Intel-Cornell Cup design contest and received an honorable mention in the finale at Disney World. The swarm of robots was designed to more efficiently explore a hazardous area. Rather than comprising of a single highly advanced robot the Swarm was designed so that multiple less advanced robots, nicknamed Grunts, would be able to explore an area to ensure that it was safe prior to it being explored by the more advanced robot, nicknamed the General. Rather than having a single point of failure this swarm would be able to continue exploring after suffering up to four different failure events. Additional details on each of the components of the swarm and some of the documentation we produced for the contest is below.
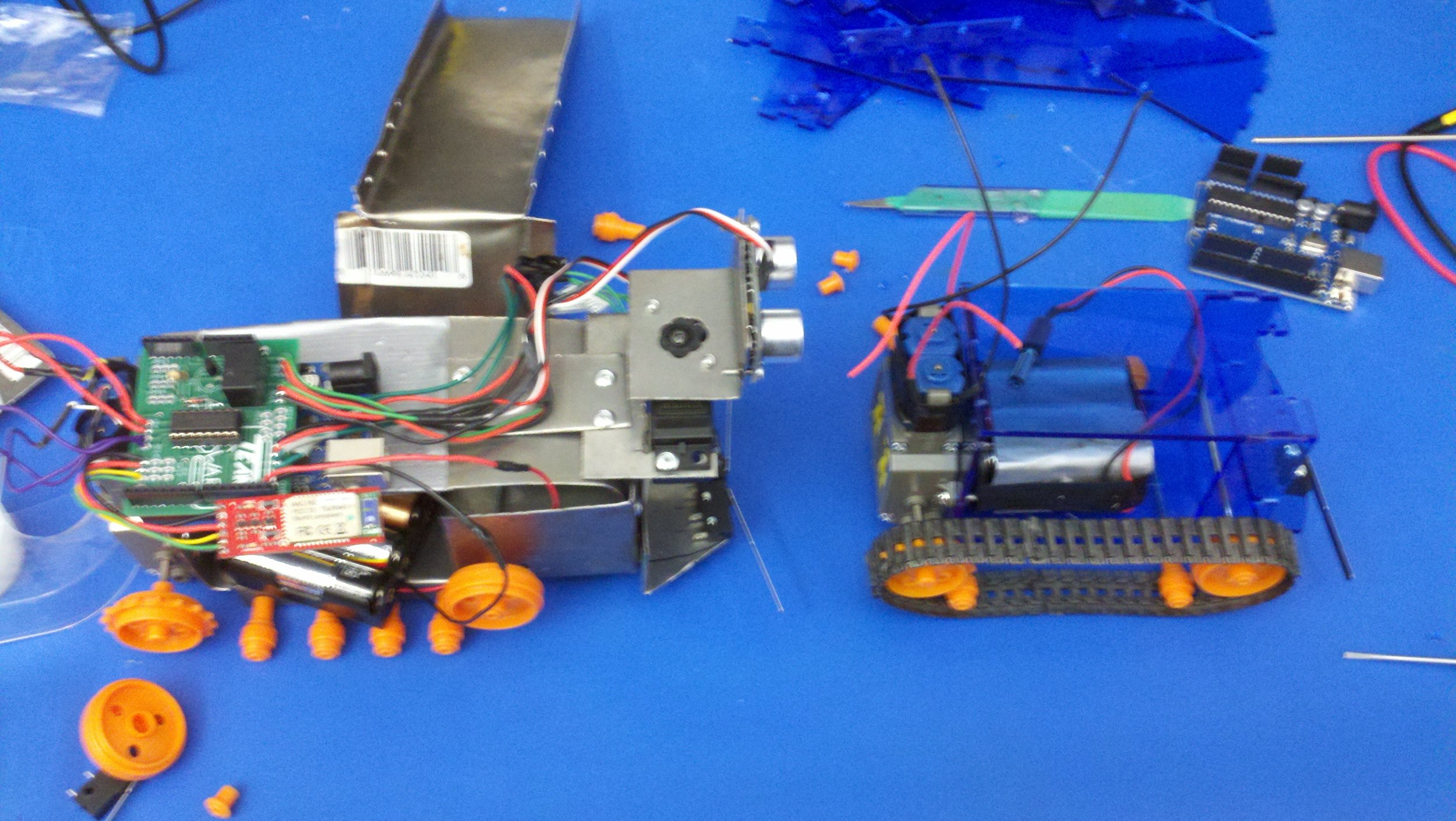
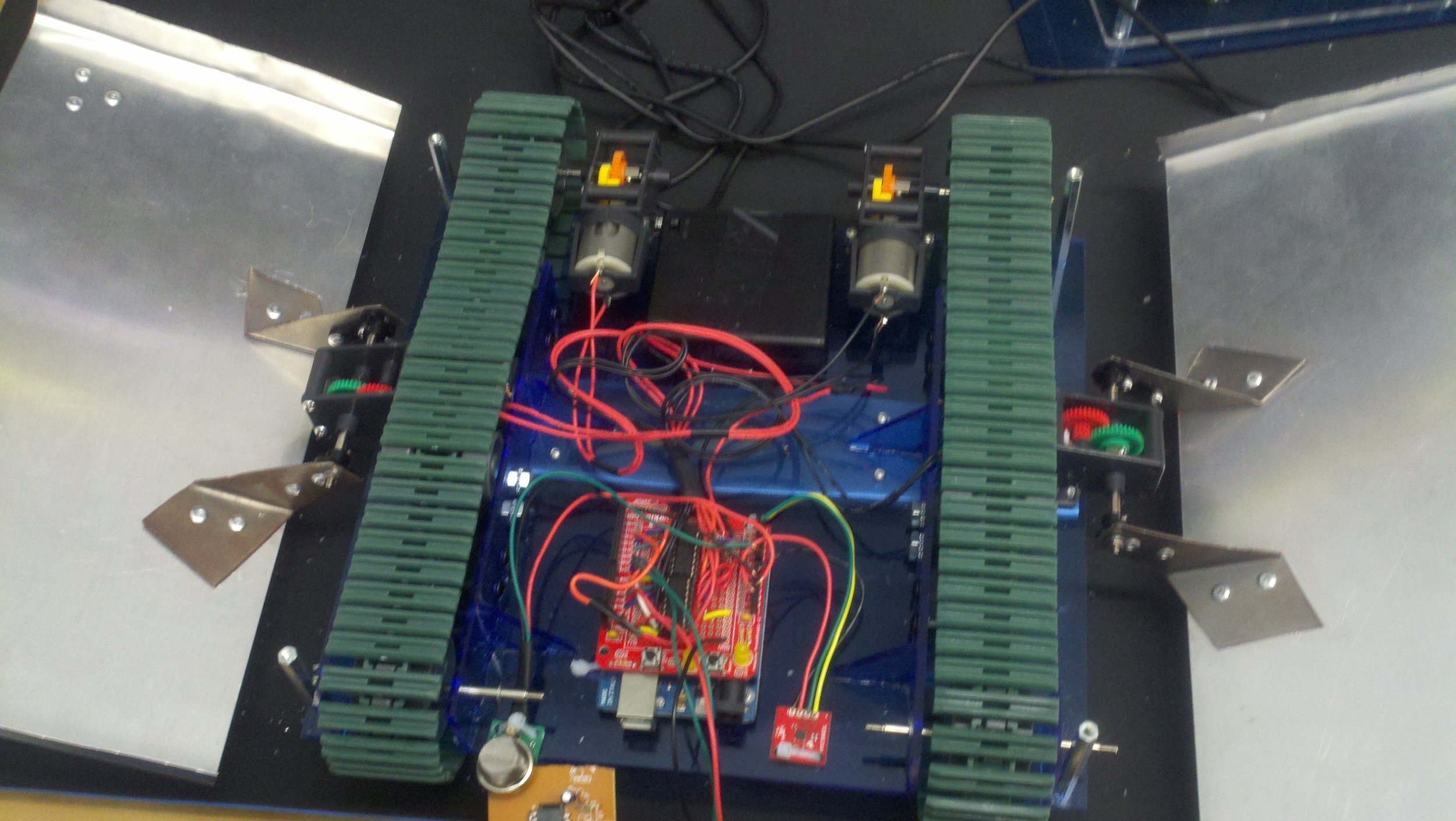
Initial Models and Prototypes
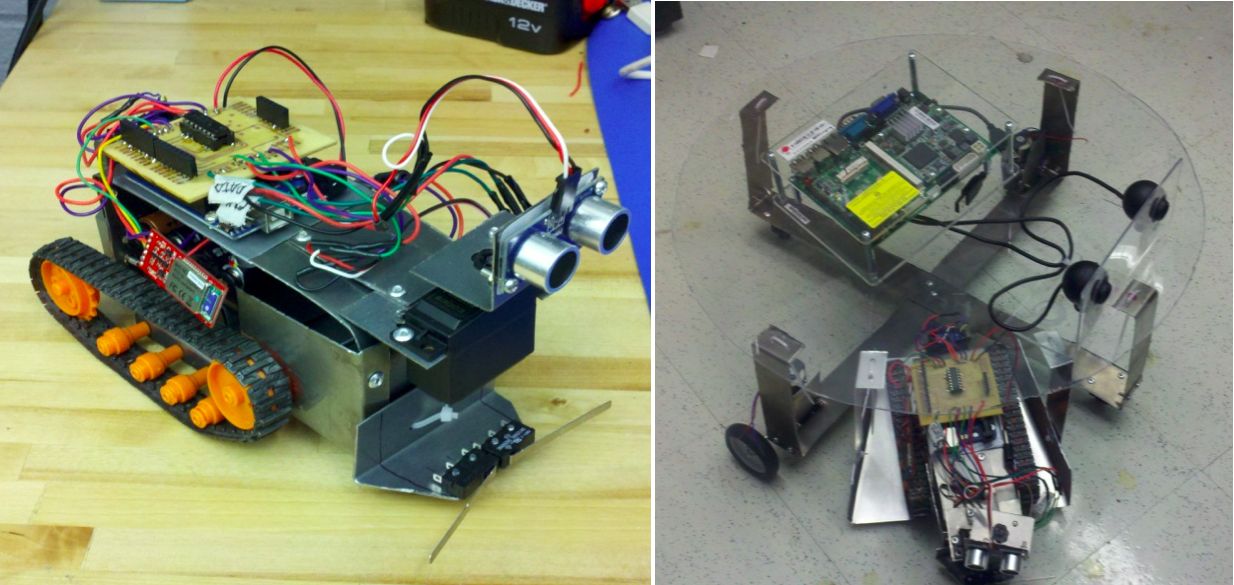
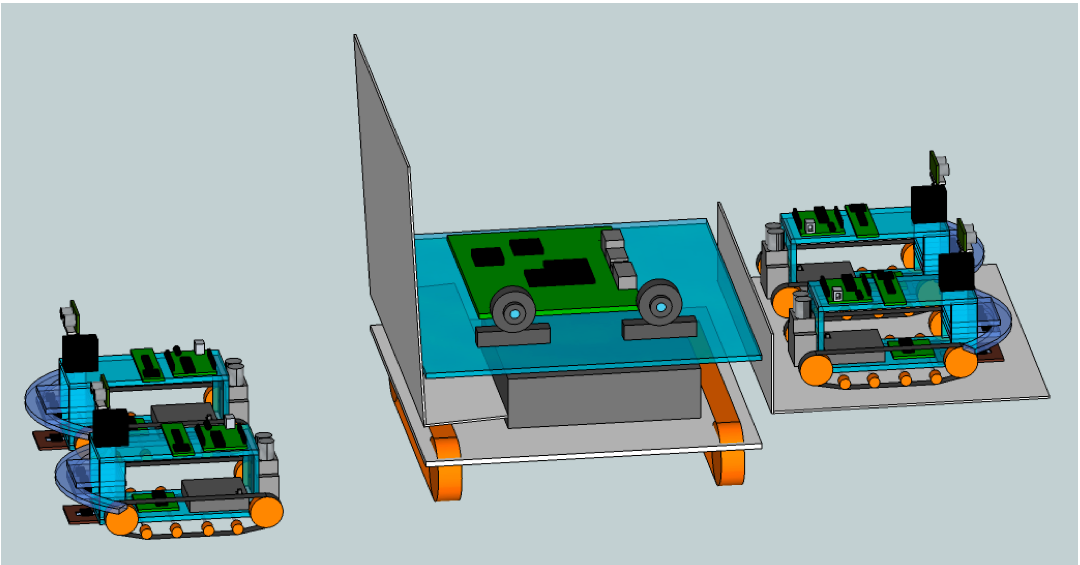
Our initial designs were done in sketchup and we then fabricated prototype versions out of mostly sheet metal. The electronics were protoboarded up and we were able to show that the major functional pieces of the robots would work. At around this point we realized that the general would not be able to move the four grunts around with the motors that we had chosen for it. We redesigned the General to use bigger motors and tracks, moved from protoboards to PCBs and switched to laser cut acrylic chassis.
Finished Swarm
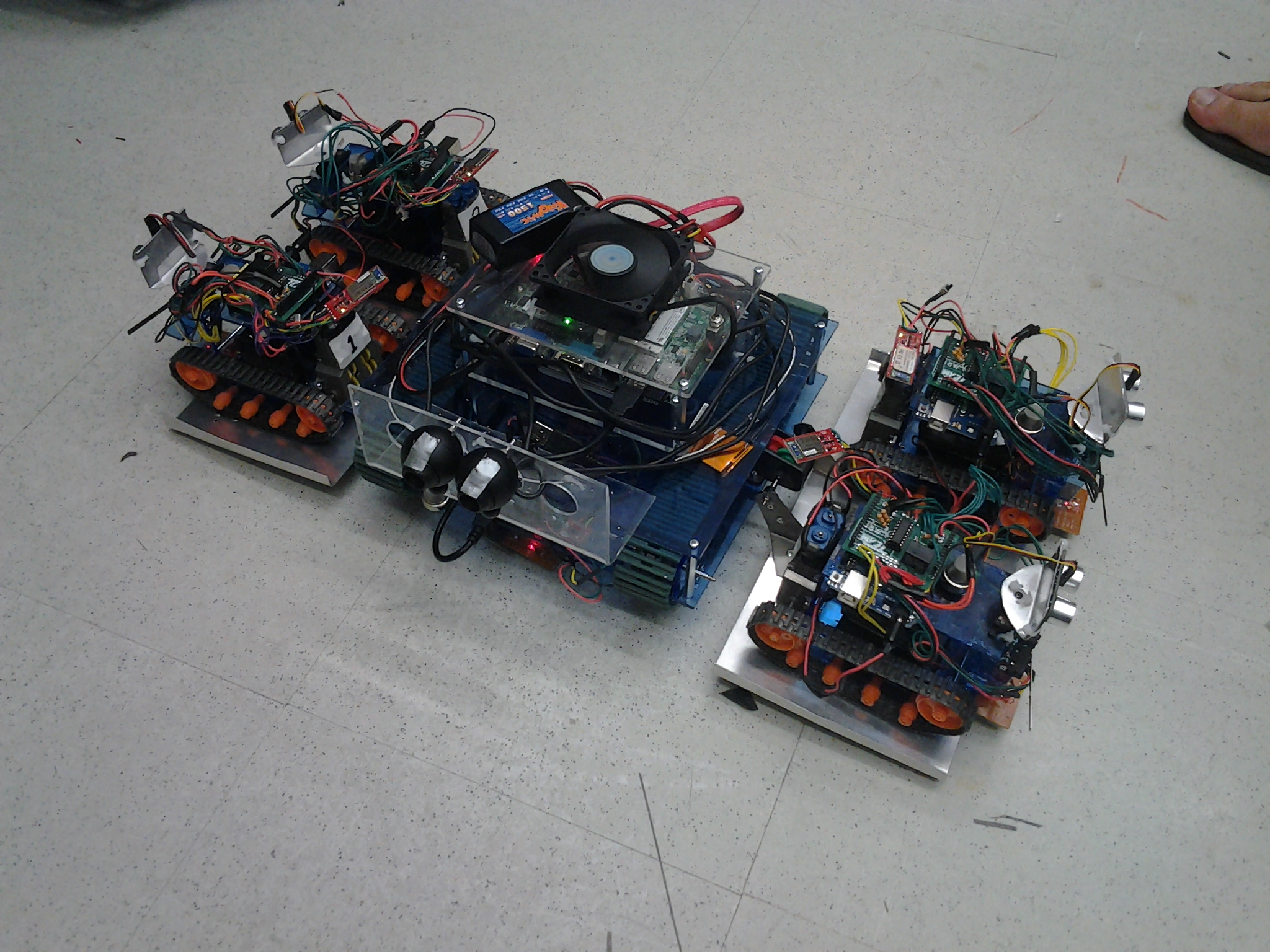
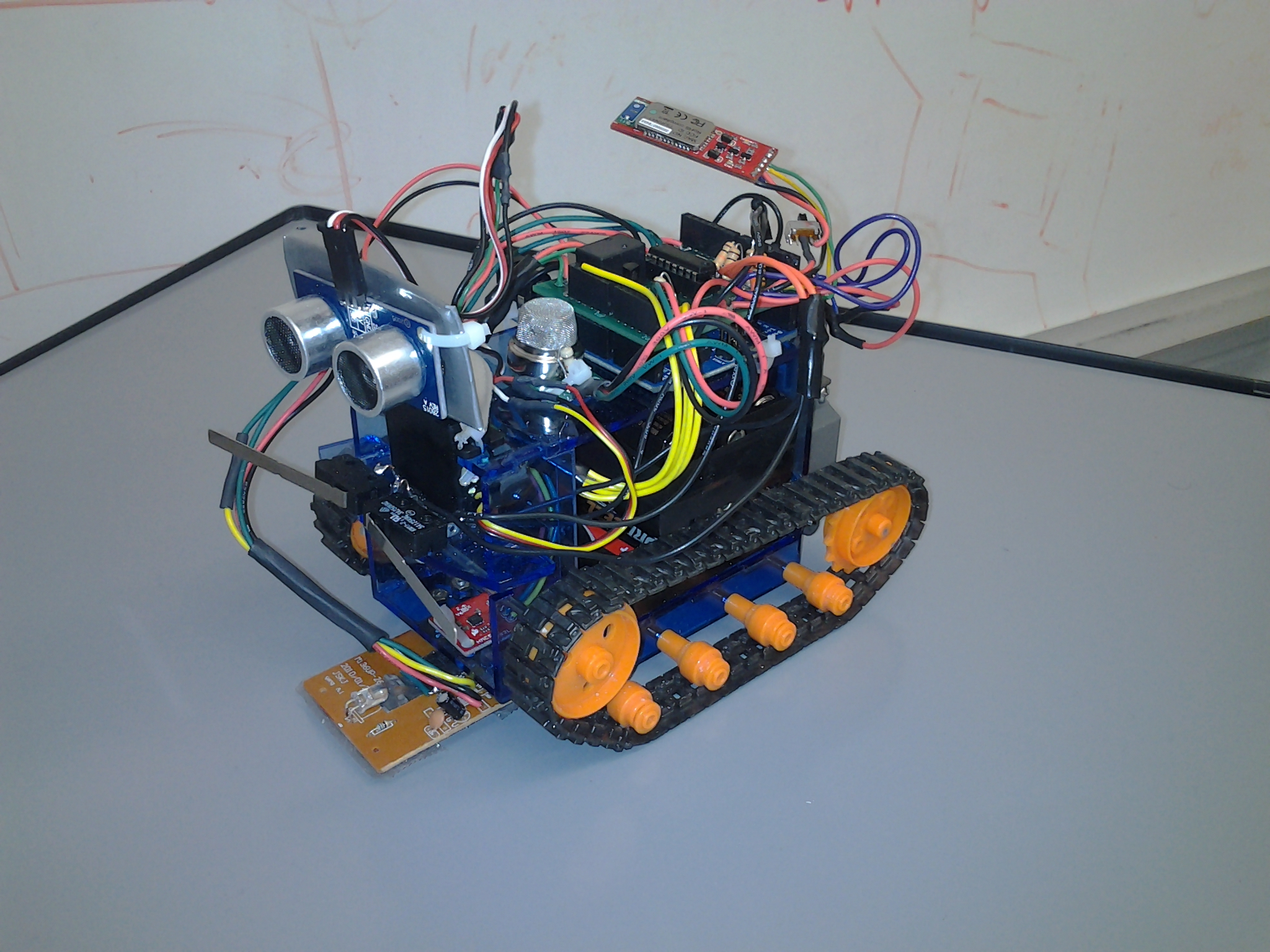

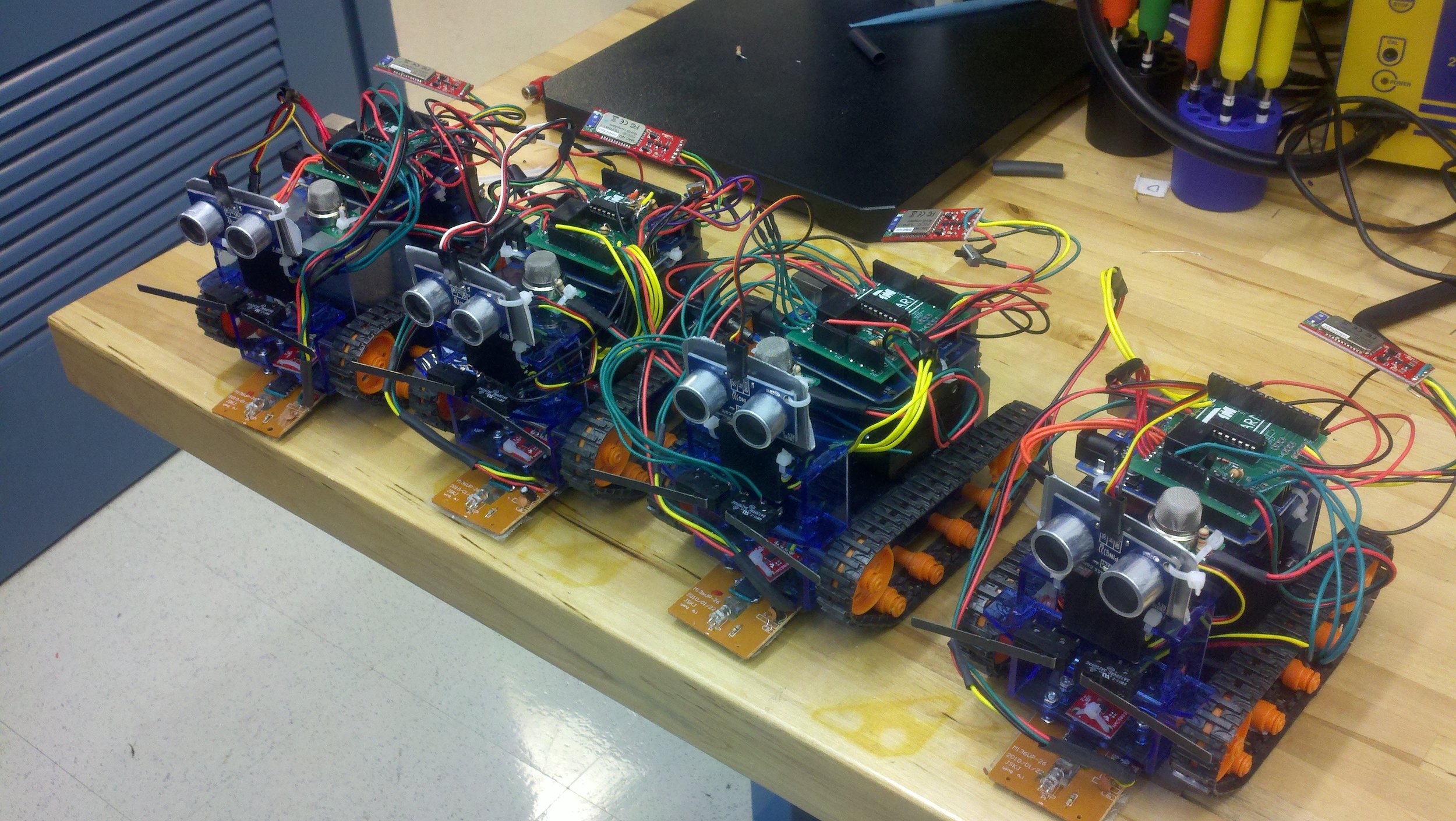
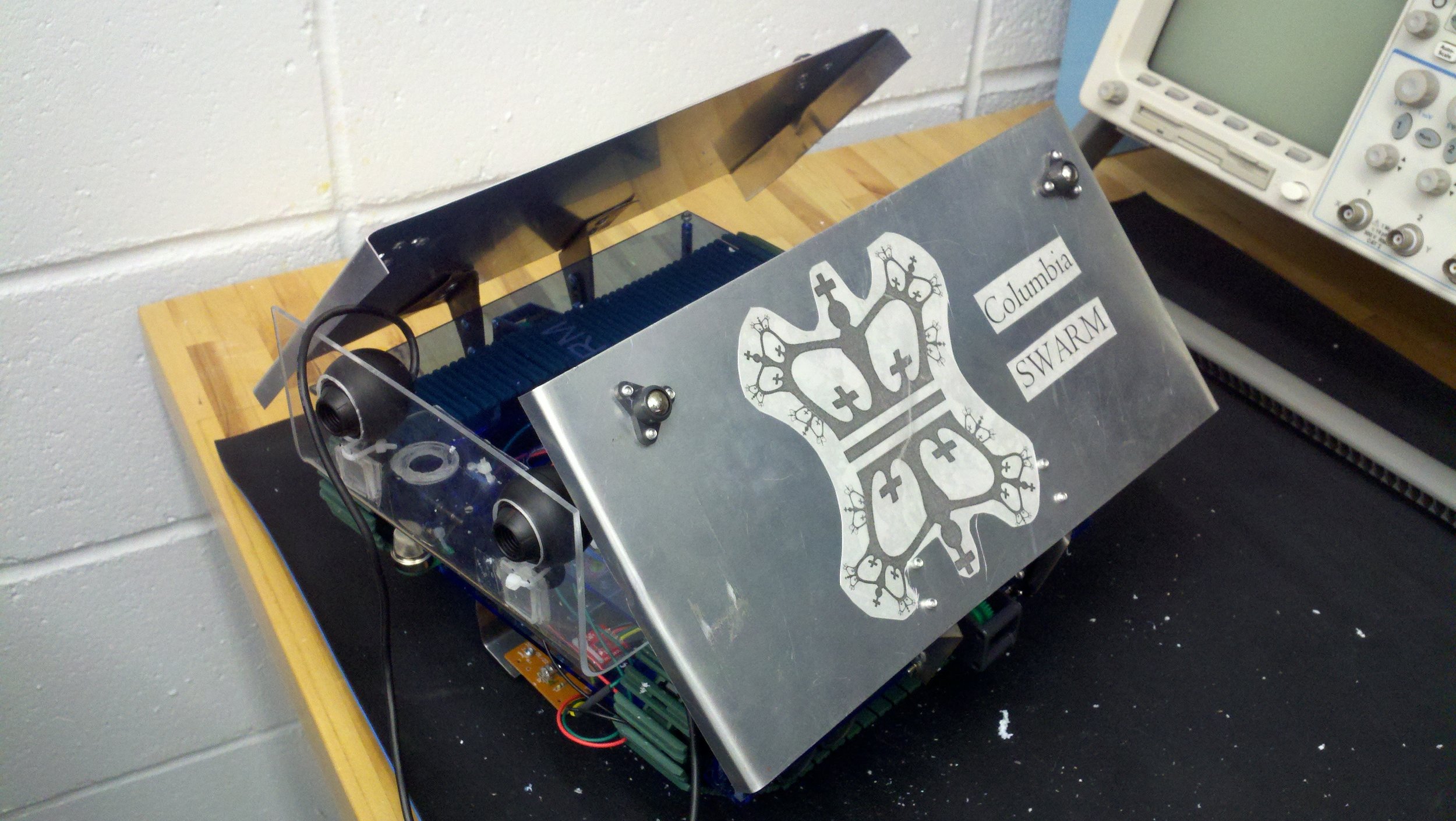

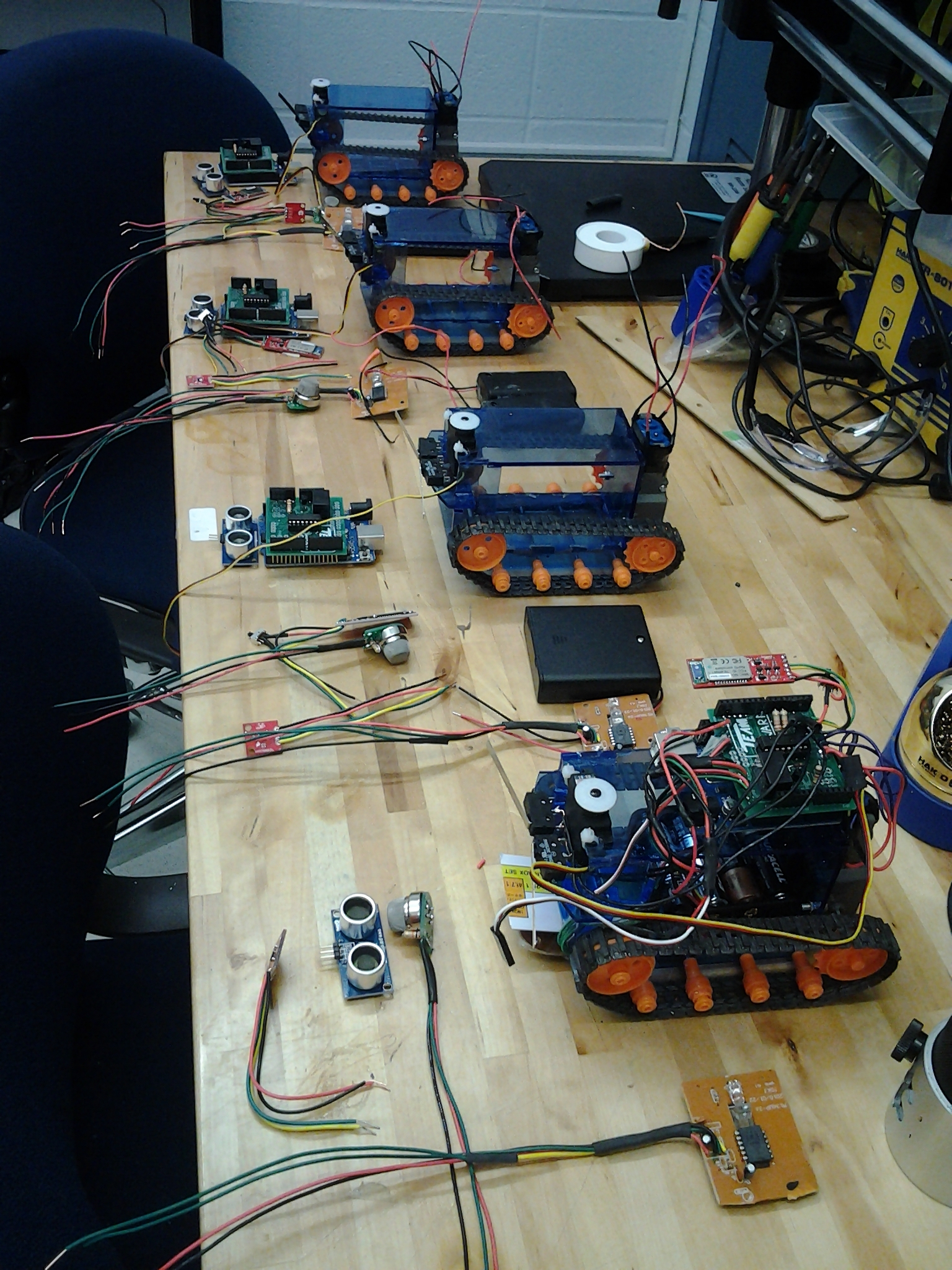

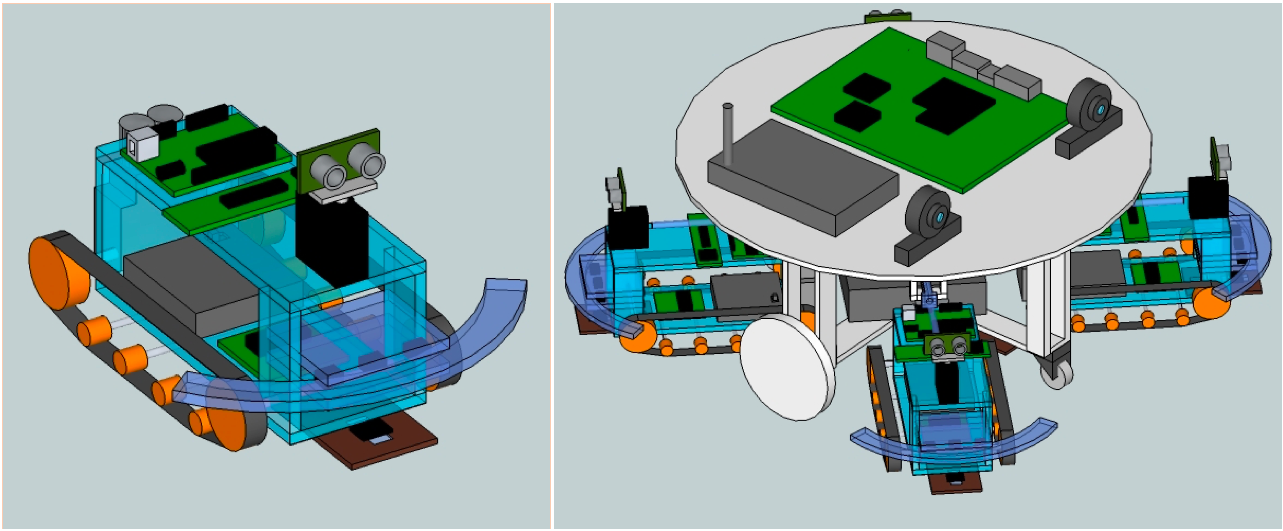
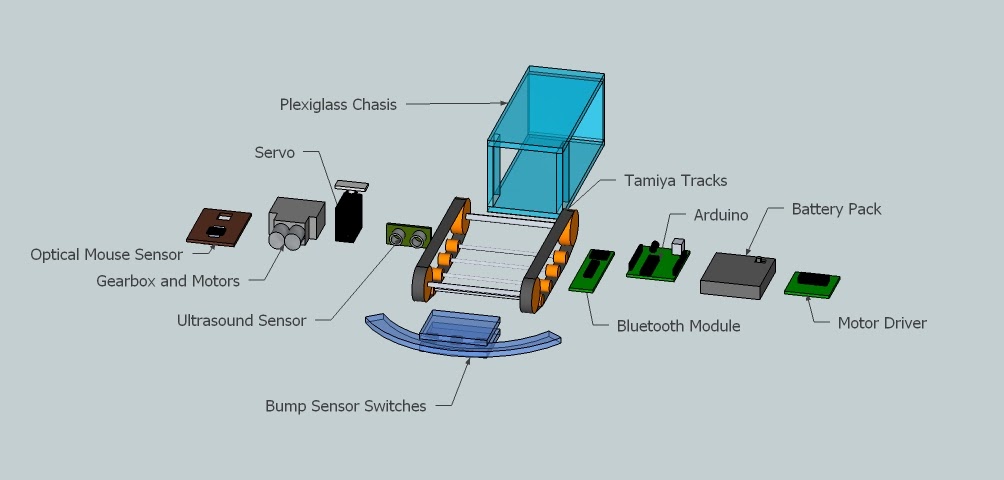
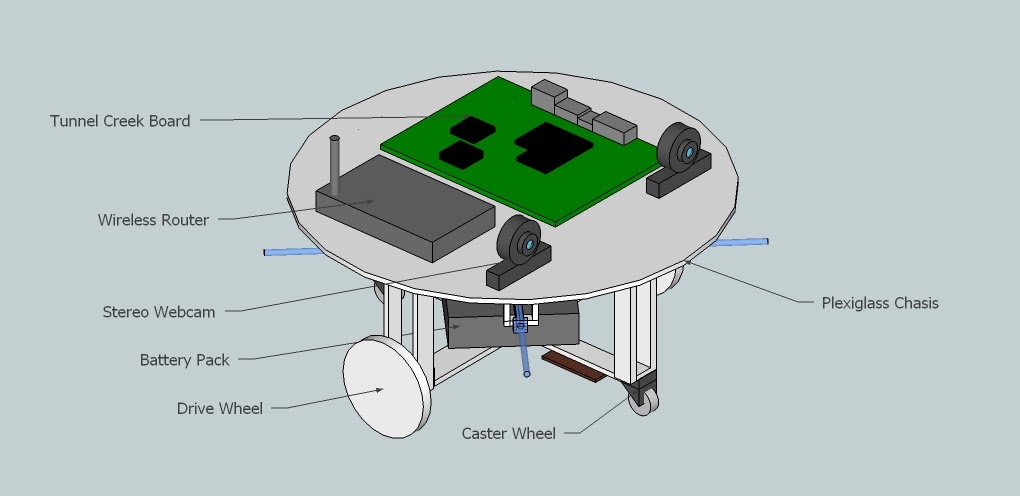
The final swarm ended up consisting of four different Grunts and a single General. Each Grunt tracked its odometery with a magnetometer and an optical mouse. They detected obstacles by having two bump sensors and an ultrasonic sensor mounted on a servo. The also sampled the air for the amount of volatile organic compounds (VOC's) that were present with a VOC sensor. Each of the grunts was controlled by a bluetooth link to the General. The General had the same optical mouse and VOC sensor as the Grunts but rather than being powered by an Arduino the General was powered by an Intel Tunnel Creek development board. The General was also equipped with two webcams that provided a stereoscopic camera view of the area the General was exploring. The General had folding deployment ramps that made it more maneuverable after it offloaded the Grunts. Overall this project was extremely fulfilling and I learned a ton about robotics. We produced this poster that still hangs in the EE lounge at Columbia and wrote this report that we turned in as part of the Intel-Cornell Cup. Our team page can still be found on the Cornell Cup website here and the results of the year we competed in it can be found here. I ended up repurposing the Grunts for numerous other robotics projects two of which are highlighted here. Please feel to reach out to me if you have any questions on this project!